
Researchers are developing advanced robots designed to excavate, transport, and mine resources on the Moon. One standout model from Tohoku University has introduced a groundbreaking approach that adapts to the Moon’s reduced gravity without sacrificing grip or power. Central to this breakthrough is an inventive spiral bucket drum that revolutionizes how lunar soil is gathered.
Japan’s Moonbot Revolutionizes Lunar Soil Excavation
As humans plan their return to the Moon, they will be supported by a fleet of robotic assistants tailored for high-demand tasks like in-situ resource utilization (ISRU). This involves extracting vital materials such as water, metals, and fuel directly from the lunar surface. A noteworthy contribution detailed in a recent arXiv paper comes from scientists at Tohoku University in cooperation with NASA and JAXA.
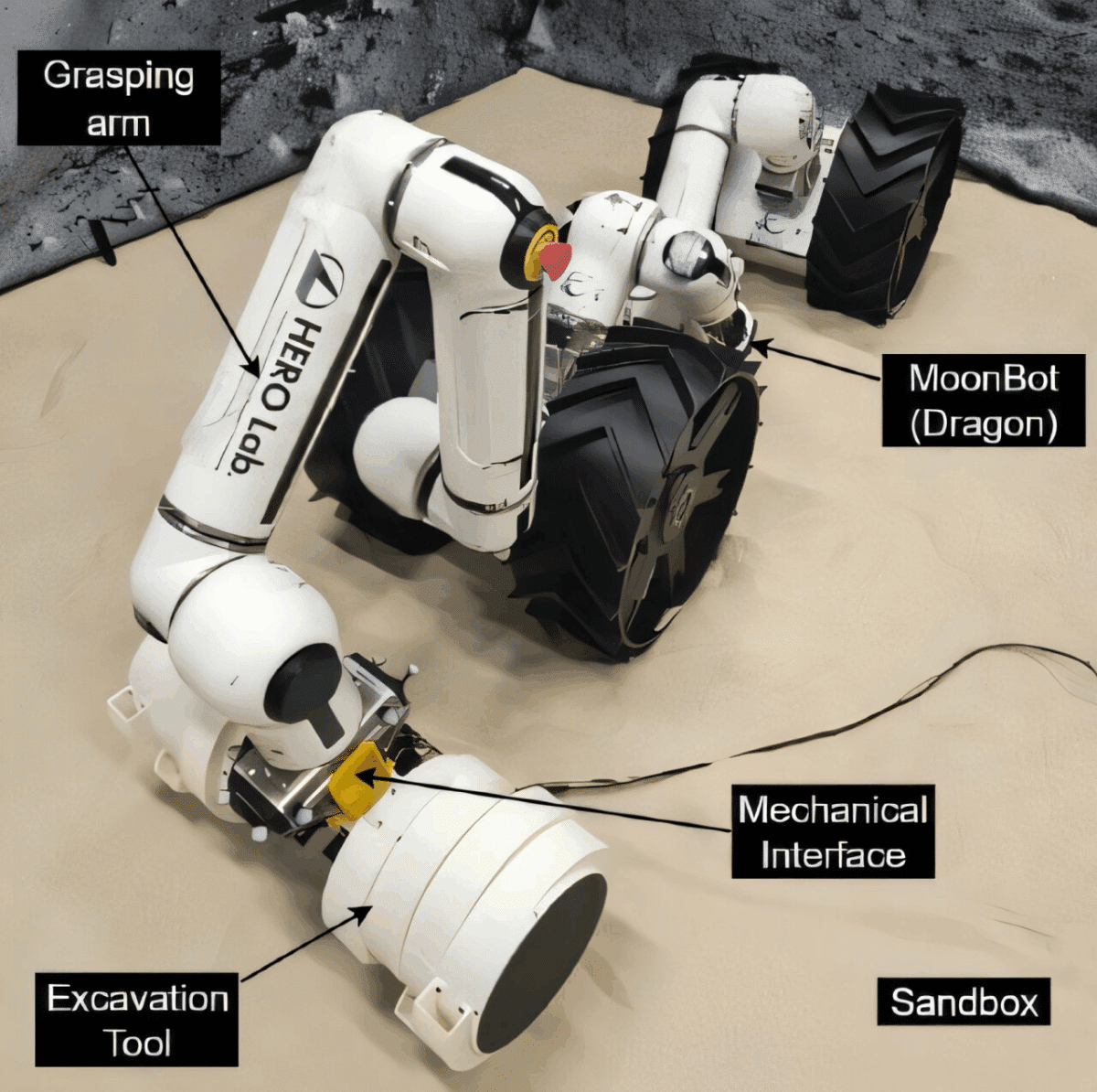
The study showcases a modular robotic excavator built on Japan’s Moonbot platform, part of JAXA’s ambitious “Moonshot Program” aimed at deploying semi-autonomous lunar support robots by 2050. Unlike Earth-bound bulldozers that rely on weight for traction, this sophisticated device employs a continuously rotating spiral bucket system that efficiently collects lunar regolith with minimal force. This design cleverly counters the challenge of the Moon’s weak gravity, avoiding the machinery pushing itself away from the ground. Constructed primarily from PLA and carbon fiber materials, the prototype can transport more than 20 liters of soil in one go, achieving excavation speeds beyond 800 kilograms per hour when combined with the Dragon rover chassis and consuming very little energy.

The Ingenious Spiral Bucket Drum Taming Lunar Low Gravity
The innovation at the heart of this robotic excavator is its spiral bucket drum—a design that tackles a key obstacle in lunar excavation: preventing material from spilling during rotation. This mechanism keeps the bucket’s intake section submerged in lunar soil while keeping the outflow slightly raised, allowing a steady stream of regolith to be collected without losses. This sophisticated solution supports continuous operation, essential in the abrasive and delicate lunar dust environment where exposed components can be quickly damaged.
During tests, the system demonstrated remarkable energy efficiency and versatility. When functioning independently, it achieved impressive excavation volumes with only 0.022 Wh per kilogram of expelled material, setting a new standard for low-energy excavation equipment. Simulated mission runs that involved digging, transporting samples 10 meters, and returning to the dig site showed performance on par with NASA’s renowned RASSOR robot, indicating the potential for coordinated multi-robot systems on future lunar expeditions.
Building an Autonomous Future for Lunar Industry
This modular Moonbot platform signifies more than a single prototype—it heralds a shift in how lunar missions might be orchestrated. By dividing excavation and transportation duties among specialized robotic units, future lunar bases can optimize productivity. Upcoming versions are expected to feature advanced sensors, enhanced durability to survive lunar temperature extremes, and adaptive controls to handle unforgiving conditions.
Japan’s strides in lunar robotics are quietly shaping the future of extraterrestrial industry. As humans gear up to set foot on the Moon again, these innovative machines will shoulder critical groundwork, enabling sustainable living and construction beyond Earth without relying on frequent supply missions. Though it might be some years before this robot officially operates in lunar soil, its arrival could unlock the dawn of a self-sufficient lunar economy.
- Categories:
- Space










0 comments
Sign in to Comment